Kalman Filter Estimation
Course: MAE 271 - Probability and Stochastic Processes
The purpose of the class project was to calibrate an accelerometer using GPS measurements. A Kalman Filter was employed to estimate the position, velocity, and accelerometer bias and the estimator was verified in simulation.
About the Course:
MAE 271A covers probability and stochastic processes in dynamical systems. Specific topics included probability spaces, random variables, stochastic sequences and processes, expectation, conditional expectation, Gauss/Markov sequences, and minimum variance estimator (Kalman filter) with applications.
Abstract:
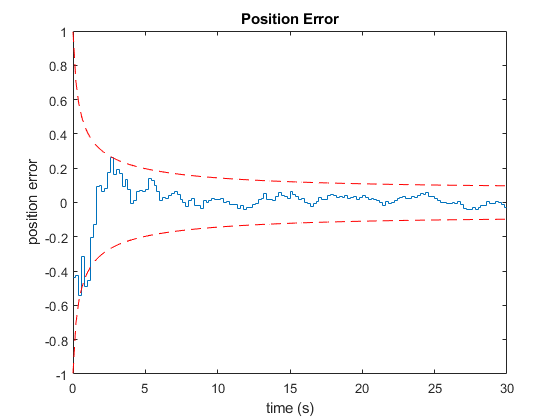
The goal of this project was to calibrate a vehicle’s accelerometer using GPS measurements. A Kalman Filter was used to determine minimum variance estimates of the system. These estimates were compared to their corresponding true values over a span of 30 seconds. The one sigma bounds from the error variance were also plotted to determine if the estimates were relatively bounded by them. A Monte Carlo simulation was run for 10,000 realizations in order to check the theoretical properties of the system. These checks confirmed the Kalman Filter algorithm was functional and the model used was sufficiently correct.