Rickshaw Robot Research
Course: Undergraduate Research Abroad at Tokyo Institute of Technology
The goal of this research project was to design and control a robot rickshaw with a natural bipedal gait and to achieve a suitable turning radius before collapse.
About the Project:
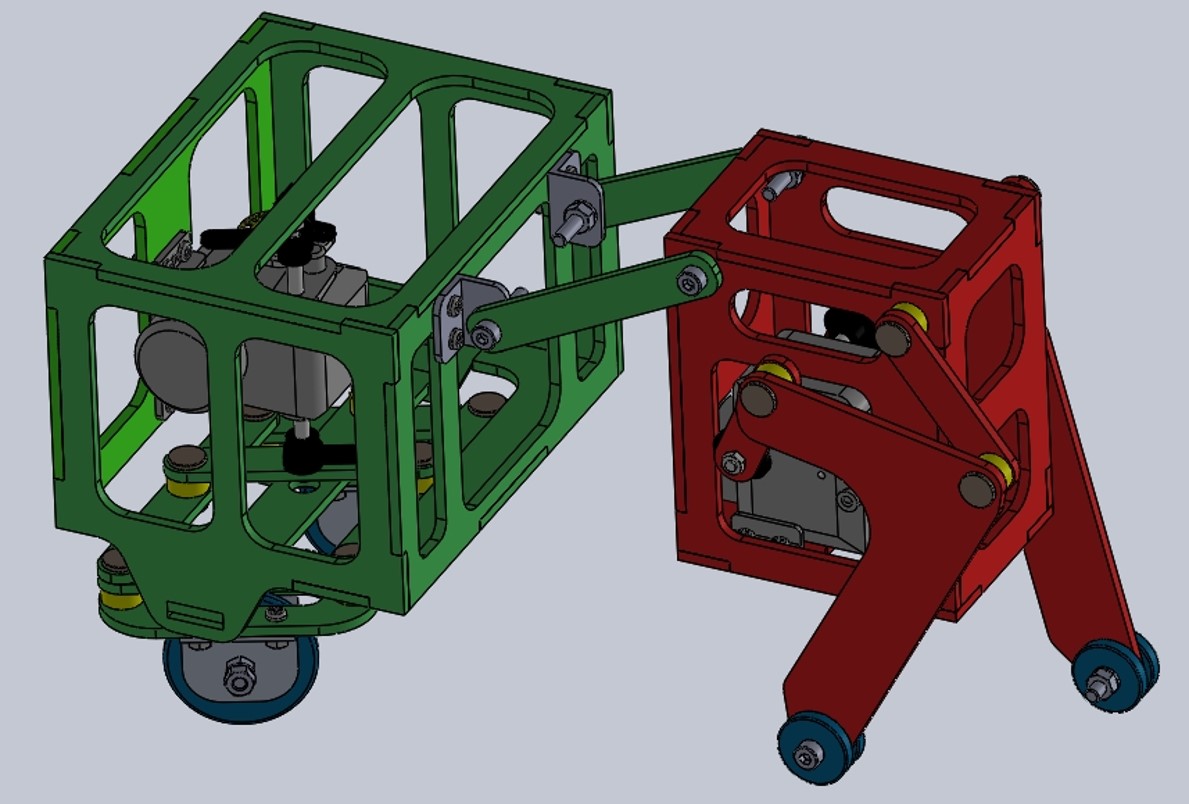
A pulled rickshaw is a human drawn carriage that seats one or two people. In this study, a biped robot was designed in place of the human to draw a cart with two passive wheels. The goal of this study was to create a natural gait and steering system using robot power. For the legs, two four-bar linkage systems were used a half cycle out of phase from each other. A parallelogram steering linkage was introduced on the cart to turn the rickshaw. A prototype of the design was tested for balance under conditions of straight walking and turning at a 40deg wheel offset in both directions. Through this experimentation, the stability and feasibility of the robot rickshaw was analyzed. A photo of my final prototype is shown above.